Synthetic vs Real-World Data for Robotics: Which to Buy for Your Physical AI Project
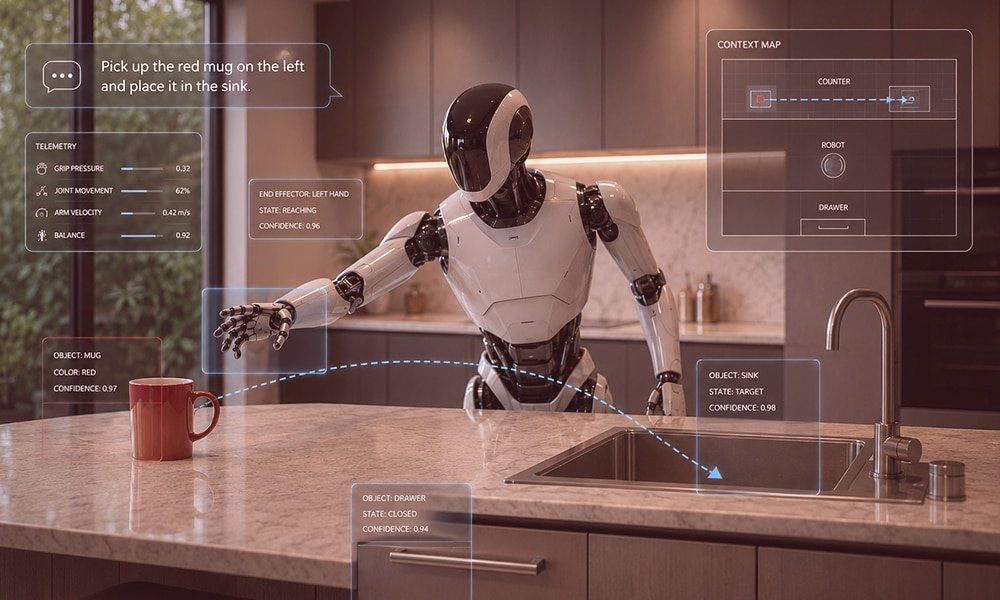
In physical AI, the model is rarely the bottleneck — the data is. A robot policy that runs flawlessly in a demo and then stalls in a live warehouse almost always fails on the data it never saw, not the architecture. That puts a budget question in front of every robotics team: when you decide […]
Synthetic vs Real-World Data for Robotics: Which to Buy for Your Physical AI Project Read More »