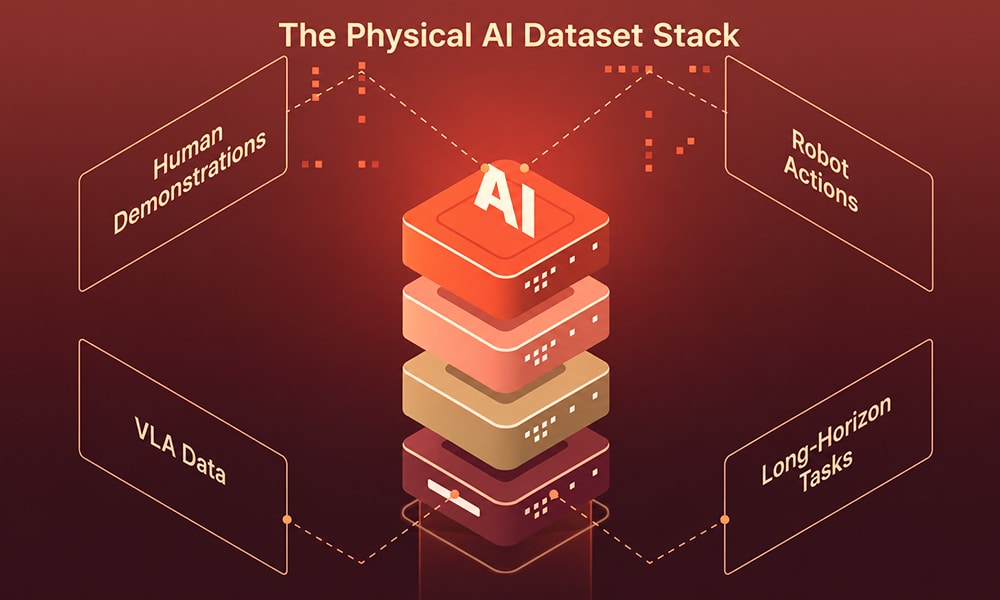
The Physical AI Dataset Stack: Human Demonstrations, Robot Actions, VLA Data, and Long-Horizon Tasks
Most physical AI teams know they need data. Few know they need a stack of it. The capabilities a deployed humanoid, AV, or warehouse robot needs — perception, action, instruction following, multi-step workflow execution — each map to a different layer of training data, with different collection methods, annotation depth, and quality controls. The physical […]